Obliczenie kalibracji |
Previous Top Next |
Obliczenie kalibracji wykonuje się klawiszem Camera Calibration umieszczonym na dialogu Points.
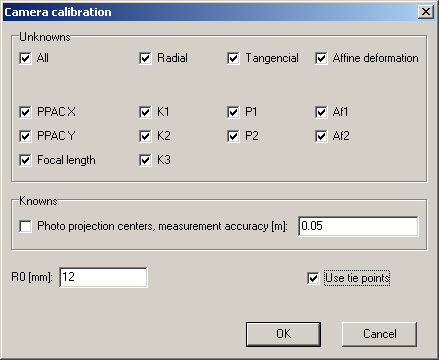
Otwiera się dialog Camera calibration:
Pole Unknowns służy do wskazania parametrów do wyliczenia:
All włącza/wyłącza wszystkie zaznaczenia
Radial włącza/wyłącza obliczenie parametrów dystorsji radialnej
Tangencial włącza/wyłącza obliczenie parametrów dystorsji tangencjalnej
Affine deformation włącza/wyłącza obliczenie parametrów deformacji afinicznej
PPAC X, PPAC Y włączają/wyłączają obliczenie współrzędnych punktu głównego autokolimacji (utożsamiany jest w stosowanym tutaj modelu z PPBS - punktem głównym najlepszej symetrii)
Focal lenght włącza/wyłącza obliczenie stałej kamery
K1, K2, K3 włączają/wyłączają obliczenie poszczególnych parametrów dystorsji radialnej
P1, P2 włączają/wyłączają obliczenie poszczególnych parametrów dystorsji tangencjalnej
Af1, Af2 włączają/wyłączają obliczenie poszczególnych parametrów
Pole Knowns pozwala na zaznaczenie opcji, która blokuje elementy orientacji zewnętrznej zdjęć. W procesie obliczeń ich wartości traktowane są jako stałe, błędy ich wyznaczenia są uwzględniane (measurement accuracy) przy budowie macierzy wag.
Opcja R0 pozwala na zadanie nominalnego promienia zerowej dystorsji. Przyjmuje się go jako 1/3 długości przekątnej obrazu.
Opcja Use tie points pozwala na włączenie do obliczeń pomierzonych punktów wiążących.
Klawisz OK uruchamia obliczenie, które w zależności od zaznaczonej opcji Use tie points może przebiegać na dwa sposoby:
1. W przypadku stosowania w wyrównaniu punktów wiążących:
Najpierw następuje obliczenie dobrych przybliżeń elementów orientacji wewnętrznej i zewnętrznej (wynik w dziale "Approximation of camera IO parameters" raportu kalibracji kamery ):
- obliczenie wcięć wstecz - wyznaczenie lepszych przybliżeń elementów orientacji zewnętrznej zdjęć
- obliczenie przybliżonych współrzędnych punktów wiążących - wcięcie w przód
- pierwotne wyrównanie prowadzące do wyznaczenia dobrych przybliżeń: niewiadomymi są jedynie poprawki do elementów orientacji wewnętrznej oraz zewnętrznej
Następnie przebiega obliczenie kalibracji - obliczenie elementów orientacji wewnętrznej oraz parametrów dodatkowych: parametrów dystorsji radialnej, tangencjalnej oraz deformacji afinicznej obrazu
(wynik w dziale "Final adjustment results" raportu kalibracji kamery ):
- obliczenie wcięć wstecz - kolejne poprawienie przybliżeń elementów orientacji zewnętrznej zdjęć
- powtórne obliczenie przybliżonych współrzędnych punktów wiążących - wcięcie w przód
- wyrównanie ostateczne prowadzące do wyznaczenia ostatecznie wszystkich wskazanych parametrów.
2. W przypadku stosowania w wyrównaniu wyłącznie punktów kontrolnych:
Najpierw następuje obliczenie dobrych przybliżeń elementów orientacji wewnętrznej i zewnętrznej (wynik w dziale "Approximation of camera IO parameters" raportu kalibracji kamery ):
- obliczenie wcięć wstecz - wyznaczenie lepszych przybliżeń elementów orientacji zewnętrznej zdjęć
- pierwotne wyrównanie prowadzące do wyznaczenia dobrych przybliżeń: niewiadomymi są jedynie poprawki do elementów orientacji wewnętrznej oraz zewnętrznej
Następnie przebiega obliczenie kalibracji - obliczenie elementów orientacji wewnętrznej oraz parametrów dodatkowych: parametrów dystorsji radialnej, tangencjalnej oraz deformacji afinicznej obrazu
(wynik w dziale "Final adjustment results" raportu kalibracji kamery ):
- obliczenie wcięć wstecz - kolejne poprawienie przybliżeń elementów orientacji zewnętrznej zdjęć
- wyrównanie ostateczne prowadzące do wyznaczenia ostatecznie wszystkich wskazanych parametrów.